
Notes on Machine Learning 6: Maximum a posteriori (MAP) estimation
by 장승환
(ML 6.1) Maximum a posteriori (MAP) estimation
Setup.
- Given data $D = (x_1, \ldots, x_n)$, $x_i \in \mathbb{R}^d$.
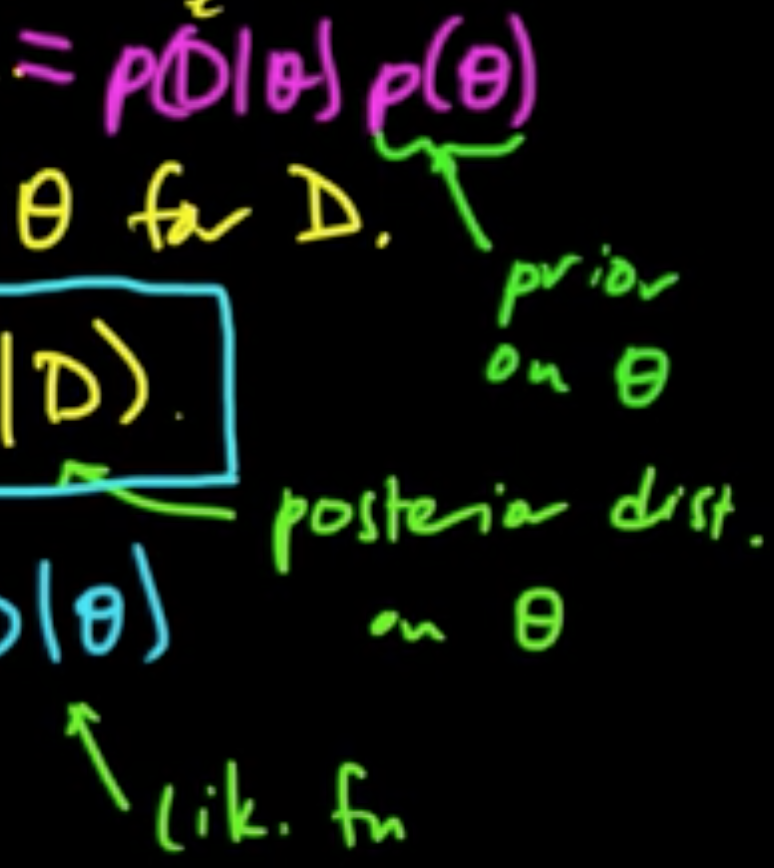
- Assume a jont distribution $p(D, \theta) = p(D\vert \theta)p(\theta)$ where $\theta$ is a RV.
- Goal: choose a good value of $\theta$ for $D$.
- Choose $\theta_{\rm MAP} = \arg\max_\theta p(\theta\vert D)$. $\,$ cf. $\theta_{\rm MLE} = \arg\max_\theta p(D\vert \theta)$.
Pros.
- Easy to compute & interpretable
- Avoid overfitting, closely connected with “regularization”/”shrinkage”
- Tends to look like MLE asymptotically ($n \rightarrow \infty$)
Cons.
- Point estimate - no representation of uncertainty in $\theta$
- Not invariant under reparametrization (cf. $T = g(\theta) \Rightarrow T_{\rm MLE} = g(T_{\rm MLE})$)
- Must assume prior on $\theta$
(ML 6.2) MAP for univariate Gaussian mean
Given data $D = (x_1, \ldots, x_n)$ with $x_i \in \mathbb{R}$.
Suppose $\theta$ is a RV $\sim N(\mu, 1)$ (prior!) and
RVs $X_1, \ldots, X_n \sim N(\theta, \sigma^2)$ are conditionally independent given $\theta$.
So we have $p(x_1, \ldots, x_n \vert \theta) = \prod_{i=1}^n p(x_i\vert \theta)$.
Then
To find extreme point, we set
to obtain $\theta = \frac{\sum \frac{x_i}{\sigma^2} +\mu}{\frac{n}{\sigma^2} + 1} = \frac{\sum x_i -\sigma^2\mu}{n + \sigma^2}$.
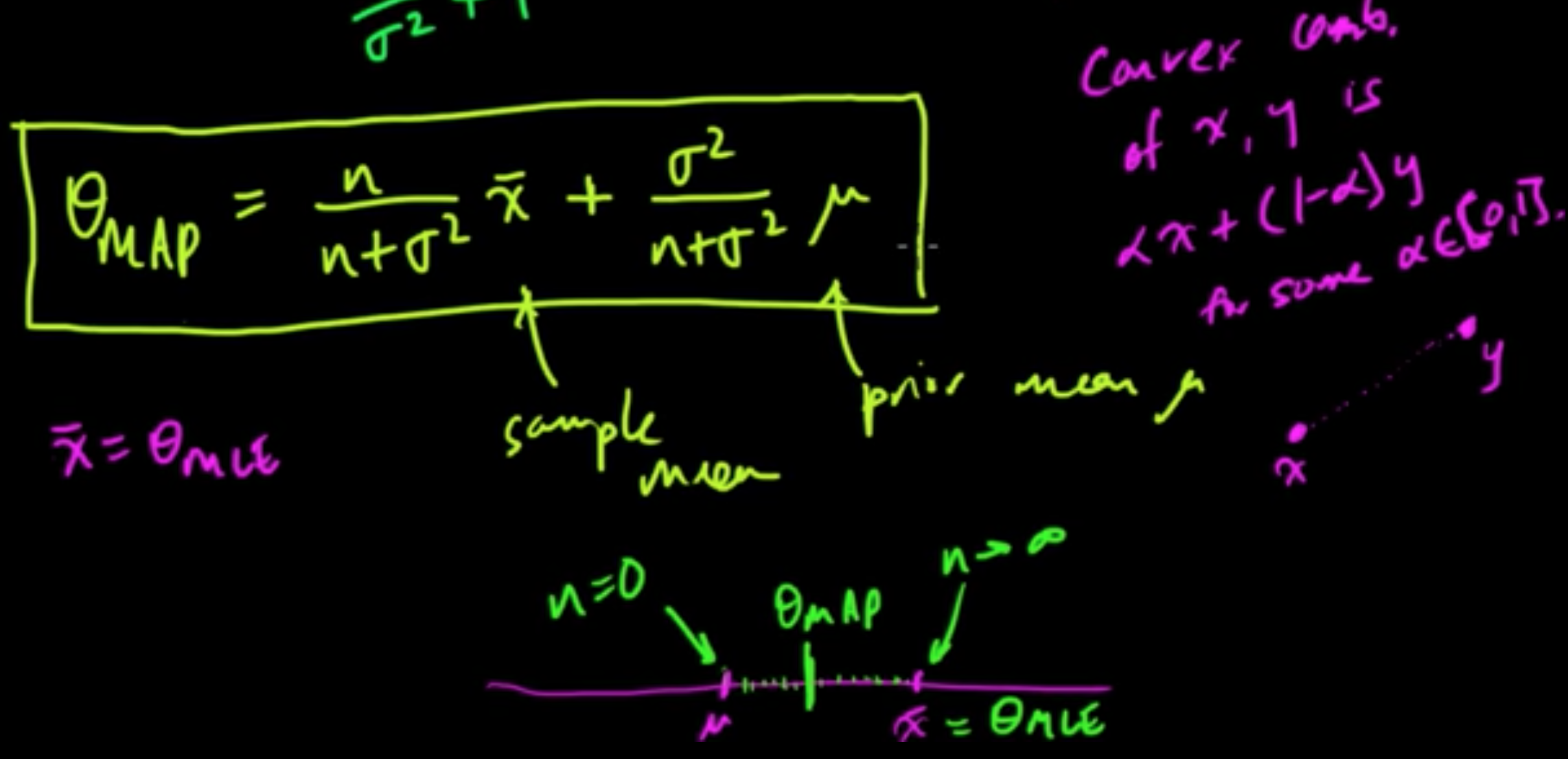
Then $\,$ $\theta_{\rm MAP} = \frac{n}{n+\sigma^2}\bar{x} + \frac{\sigma^2}{n+\sigma^2}\mu$.
(ML 6.3) Interpretation of MAP as convex combination
Subscribe via RSS